




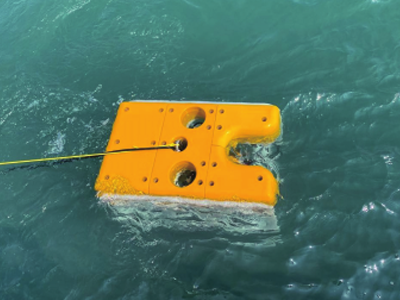




An important bottleneck of AUV in long-term underwater operations is the issue of energy supply, namely, charging; In addition, in the case of limited satellite channel bandwidth and underwater covert navigation requirements, the upload of a large amount of data obtained underwater is also a bottleneck. For this reason, we are studying the use of mobile large underwater docking stations to address the above bottlenecks.

01 Two modes
AUV is divided into two modes underwater
Task Mode
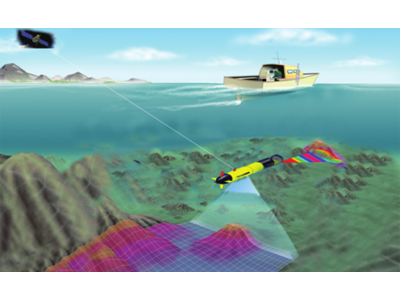
The mission mode is mainly based on the AUV's mission planning, utilizing key technologies such as sensor data acquisition, data driven, and SLAM navigation to achieve efficient underwater AUV operations.
Docking mode
When the AUV detects that its power level is low enough to support subsequent tasks, or that the AUV business data needs to be uploaded, the AUV automatically enters the connection mode.

02 Three stages
The AUV connection mode is mainly divided into three stages
AUV remote navigation stage
First, the first stage is the remote navigation stage of the AUV. At this time, the AUV is outside the range of acoustic sensing, and the AUV uses the onboard attitude and velocity sensors for integrated navigation.
Homing phase
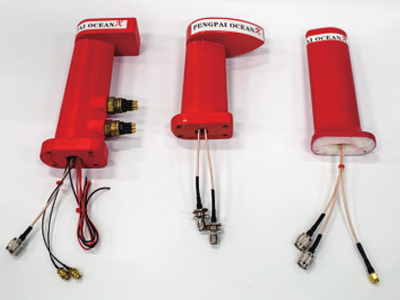
The second stage is the homing stage, in which the AUV navigates to the acoustic sensing range. Using the onboard acoustic sensing equipment, the direction of the acoustic beacon installed on the underwater dock station is measured, and the distance between the AUV and the underwater dock station and the location of the dock station are calculated.
Terminal homing phase
The third stage is the terminal homing stage. When the AUV enters the visual range of the underwater docking station, optical connection is used to guide it into the docking station.
The whole process of automatic docking of AUV
The key technical issues addressed during the entire process include: optical sensing under fuzzy and uneven underwater connection environments, and SLAM precise navigation and positioning based on robust data association; Under the conditions of uncertain crossflow interference and real-time obstacle avoidance during AUV underdrive and homing, the attitude and orbit during docking are synchronized and optimized online based on virtual domain inverse dynamics and dynamic window method; Aiming at the problems of inaccurate attitude control and rudder force failure during low-speed terminal docking, a hybrid docking control based on ILOS and deep reinforcement learning is adopted.






