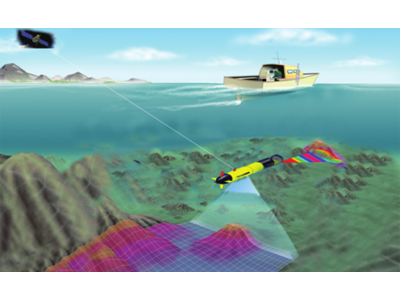
The simulation and training platform for ocean unmanned systems adopts an extensible and modular design idea. Based on the use process of ocean unmanned systems (AUV, ROV, USV, etc.) and the information flow transmission in their actual work, and in combination with the use and operation training requirements of relevant personnel, a digital simulation model is built, which can effectively simulate the dynamic/kinematic characteristics of single/cluster ocean unmanned systems in the marine environment, the use of sensor loads Interaction of environmental information and marine operation process.