








Underwater robot is a device that can move underwater, has vision and perception system, and uses manipulator or other tools through remote control or autonomous operation to replace or assist people to complete some underwater operations.
Underwater robots are service robots with a history of more than 60 years. The research direction of underwater robots is mainly unmanned, so that they can work in highly dangerous, polluted and zero visibility water environment. Equipped with sonar systems, cameras, lighting lamps, mechanical arms and other devices, they can complete real-time video transmission, sonar image rendering, lifting and other professional operations. At present, underwater robots have been widely used in ocean exploration, aquaculture, underwater detection and maintenance, search and rescue, consumer entertainment, military, education and other fields.
Underwater robots began in the military field. From 1953 to 1974, underwater robots began to be developed and developed. The CURV system of the United States successfully recovered a hydrogen bomb in the Spanish Sea, which attracted the attention of all countries in the world. With the advancement of military projects in various countries, since the first unmanned underwater vehicle came out in 1953, a total of 20 unmanned underwater vehicles have been developed in the world in the 20 years to 1974.
The early underwater robots should be applied to the offshore oil exploration business. From 1975 to 1985, due to the rapid development of the offshore oil and gas industry, the rapid development of underwater robots entered a new development period. By 1981, there were more than 400 unmanned remote-controlled underwater robots in the market, of which more than 90% were used to directly or indirectly serve the offshore oil exploration industry. The need for offshore oil and natural gas development has promoted the research on the theory and application of underwater robots, and the number and types of underwater robots have increased significantly.
According to the different contact ways between the unmanned submersible and the surface support equipment (mother ship or platform), the underwater robot can be divided into two categories: one is the cabled underwater robot, which is traditionally referred to as the remotely operated vehicle (ROV), which is powered by the mother ship through the cable, and the ROV is remotely controlled by the person on the mother ship through the cable; The other is the cableless underwater vehicle, which is customarily referred to as the Autonomous Underwater Vehicle (AUV). The AUV carries its own energy and relies on its own autonomous ability to manage and control itself to complete the mission entrusted by people.
1、 Classification of ROV
The number of ROVs is large, the design is different, and the function and complexity are different. All these make it difficult to accurately classify ROVs. According to industry practice, Douglas Westwood, UK, divides ROVs into seven types, namely, miniature ROVs (MROVs), visual ROVs (Eyeball ROVs, EROVs), observation ROVs (IROVs), remotely operated Towed Vehicles (ROTVs), work-class ROVs (WROVs), tracked ROVs (TROVs), and digging ROVs (Ploughhs).
1. Micro ROV (MROV)
Micro ROV is the fastest growing segment of ROV industry in terms of sales volume. They are usually all-electric systems for inspection and monitoring of open or closed waters (such as tanks). MROV can be used in various environments, such as clean water, polluted water, cold water, sea water, etc. The working depth of MROV is generally less than 100 meters, but if it is carried on other large diving equipment, it can reach any depth theoretically. Some MROVs are equipped with image sonar to enable them to be used in low visibility environments. In addition, MROV can also be equipped with other equipment, such as small robots.
2. Visible ROV (EROV)
The visual ROV is usually an all-electric system, used to perform inspection tasks, and sometimes also used to support divers' diving activities. EROV checks the dangerous waters before the divers go down, or provides lighting and image recording for them. EROV is widely used in scientific research because of its low cost. Although EROV does not have the power and load of operating ROV, it can also be used as a platform for various sensors, tools and equipment, manipulators, etc. Most EROV's working water depth is within 300 meters, and its working water depth and function are improving with the progress of technology.
3. Observation ROV (IROV)
Observation ROV is usually used for underwater structure and hardware inspection, measurement, fishing, collection of physical and image samples, etc. The IROV can be equipped with a manipulator similar to the WROV, but the manipulator is not fixed, but can be removed at any time, which makes the IROV have great flexibility and choose different equipment when performing different tasks. In the early stage, IROV used hydraulic propulsion, but now it is increasingly using electric propulsion. The working water depth of most IROVs is within 1000 meters. IROV is widely used in the field of marine renewable energy due to its function and cost.
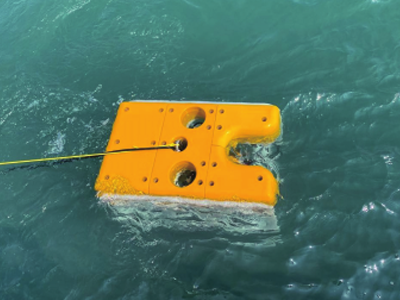
4500-meter "Haima" ROV
4. Drag ROV (ROTV)
The towed ROV is towed by surface boats and is the platform of underwater sensors. The horizontal and vertical position of the ROV is controlled by the control unit on its surface, so that it can accurately perform tasks such as measurement. The ROTV has a large size and can provide enough power and data transmission speed through the streamer. Therefore, the ROTV can carry more measuring equipment and sensors than AUV. ROTV measurement has high stability and can obtain accurate longitude, latitude, height and other position information. The linear measurement method of ROTV can be used for submarine cable and pipeline inspection, as well as military torpedo detection. Compared with WROV, the measurement speed of ROTV is faster, but it cannot perform more in-depth and detailed work like WROV. Boats using ROTV are also equipped with IROV to monitor whether there is any abnormality in the ROTV when performing tasks.
5. Operational ROV (WROV)
The operational ROV is mainly used in the oil and gas development industry, including drilling support, construction support, inspection, repair and maintenance and other subdivisions. The working ROV is usually equipped with two manipulators, which can directly grasp, push, pull, etc., and can also use other tools. The operational ROV obtains power and control information through cables, which can not only monitor and explore, but also serve as a platform for various underwater tools. Some manufacturers classify WROV as heavy and super-heavy according to the different tasks of WROV, while others classify WROV as investigative type because it can carry a large number of sensors and has high data transmission speed. WROV is usually configured on special ships equipped with ROV Launch and Recovery System (LARS). The working water depth of WROV is more than 1000 meters, usually between 3000 and 4500 meters, which is also the scope of most commercial operations. Some WROV can reach deeper waters according to different tasks.
6. Track-type ROV (TROV)
Crawler ROV is mainly used for subsea mining and installation and burial of cables/pipelines. Since it is mainly used for subsea operations, the use of crawler ROV is more convenient for activities. At present, a large number of TROVs are used for cable installation of marine renewable energy projects, or for hydrological characteristics measurement of the installation location of offshore wind turbines. Some TROVs have been placed underwater for a long time for ocean observation.
7. Mining ROV (Plough)
Excavation-type ROV is the largest ROV, which is used for submarine pipeline burial in waters that are easily disturbed or damaged by fish schools. Plough is driven by large ships, with a large number of tools, equipment and systems, and its cost and use cost are very high.
Industrial underwater robot
The above classification methods may be too complex. There is also a relatively simple classification method for ROV, that is, ROV is only divided into observation level and operation level. Observation level ROV carries out regular observation and inspection for specific underwater targets, such as underwater infrastructure, fishery, hull, and scientific research projects. Its core components are underwater thrusters and underwater camera systems, sometimes supplemented by conventional sensors such as navigation and depth sensors. The body size and weight are small (usually less than 15kg), the load is low, the cost is low, and the working depth is generally within 1500 meters.
The operational ROV is used for underwater fishing, underwater construction and other applications, with underwater manipulator, hydraulic cutter and other operating tools, and also equipped with forward-looking sonar, side-scan sonar, seabed mapping, seabed profile and other equipment, with large size and weight, high cost, and working water depth up to 6000 meters.
2、 Application of ROV
Image
ROV is widely used in military, coast guard, maritime, customs, nuclear power, hydropower, offshore oil, fishery, marine rescue, pipeline exploration and marine scientific research and other fields. The world's major maritime powers, such as the United States, Russia, Japan, the United Kingdom and France, have developed various types of ROV systems for different missions and different depths of work.
In terms of civil use, R0V plays a very important role in marine rescue and salvage, offshore oil exploitation, underwater engineering construction, marine scientific research, seabed mineral exploration, ocean operations, etc. At present, the world's ROV is mainly concentrated in the oil and gas industry and offshore and offshore projects. To sum up, ROV mainly has several applications in civil use:
1. Oil and gas
The exploration and development of oil and gas is the most widely used field of ROV, including drilling support, construction support, inspection, repair and maintenance, etc. The drilling support includes monitoring the seabed, assisting in controlling the position of the base plate, and monitoring and cleaning the blowout preventer. Construction support includes installation of underwater treatment and separation equipment, repair of underwater production wells, pipeline installation, etc. Inspection, repair and maintenance include inspection of the internal or enclosed area of the oil tank, non-destructive inspection of equipment, replacement of damaged parts, etc.
2. Marine renewable energy
The application of ROV in the field of marine renewable energy is mainly equipment installation, wiring and inspection, repair and maintenance. In terms of equipment installation and wiring, ROV can assist in cable installation and burial, as well as installation of wave and tidal power generation equipment. In terms of inspection, repair and maintenance, ROV can measure the hydrological characteristics of the locations where offshore wind turbines may be installed.
3. Oceanographic survey
Underwater survey includes topographic survey, route survey (pipeline and cable), hydrological survey, etc. Topographic survey mainly measures the depth, topography, structure and underwater obstacles of the seabed. The route survey is mainly to ensure the safety of the pipeline installation and reduce the installation cost, so that the pipeline can avoid the obstacle area, deep sea tidal area, military application area and other waters. The hydrological survey is not used for installation or construction, but to understand the ocean hydrodynamic conditions, so as to make the ocean navigation safer.
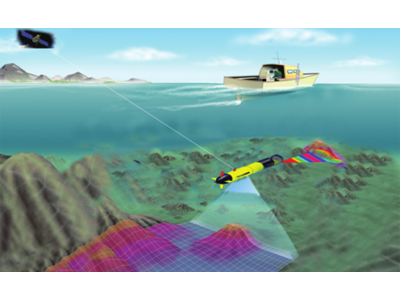
Schematic diagram of underwater sonar detection
4. Power/communication
The application of ROV in the field of power/communication mainly involves the installation and burial of communication cables/cables, as well as regular or irregular inspection, repair and maintenance of cables. During the installation and burial of communication cable/cable, ROV system and buried cable system are placed on the cable laying vessel, which can be operated at any time to shorten the project time. During the inspection, repair and maintenance, because the communication cable/cable is easy to be damaged and needs to be fished out from the seabed when damaged, ROV is used to detect and fish the cable.
5. Nuclear facility
ROV can be used for the inspection, repair, maintenance of nuclear facilities, and the dismantlement of nuclear facilities when they are scrapped. In areas with high radioactivity, the electronic equipment of ROV needs to be protected. The ROV that can crawl on the ground or wall is usually used to inspect and dismantle the nuclear facilities, and the radioactive substances leaked into the sea also need to be identified and removed by the ROV.
6. Undersea resources
Some areas of the ocean are rich in energy, metals, minerals and other resources. For example, countries along the western Pacific Ocean and the Indian Ocean have rich seabed resources. Therefore, the exploration and development of seabed resources has become one of the main areas of ROV application. Generally, observation level ROV can be used for seabed resource exploration, while operation level ROV can be used for seabed resource development.
7. Scientific research
The application of ROV in research can be divided into science-related applications and technology-related applications. The applications of science related aspects include archaeology, aquaculture/fishery, environmental monitoring, marine sample collection, deep-sea hydrothermal investigation, turbulence research, etc. Technology-related applications include ROV intelligent system, task optimization, application of collision avoidance rules, and automatic manipulator operation, data processing and sample collection.
8. Security detection
In the field of security, ROV can be used to carry out hull inspection, inland river and coastal patrol, search and rescue, etc. in ports. Ship hull inspection is an important part of marine safety inspection. It is mainly used to check whether the ship carries drugs, smuggled goods, explosives and other illegal goods through public or concealed means. Inland river and coastal patrol is to find or prevent terrorists, pirates and other attacks on important targets at sea. Search and rescue is mainly used in case of maritime accidents.
3、 ROV development in major countries or regions
From the perspective of countries, Japan, Europe, the United States, China and other countries have their own characteristics in developing ROV. The development of major countries is as follows:
1. Japan
In 1987, the Japanese Marine Science and Technology Center successfully studied the deep-sea unmanned remote control submersible "Dolphin 3K", which can dive 3300 meters. The purpose of "Dolphin 3K" is to carry out deep-sea research such as investigation of the planned diving site before manned diving, and at the same time, "Dolphin 3K" can also be used for submarine rescue. "Dolphin 3K" is equipped with two sets of power units in front and back, up and down, and left and right directions, which can basically meet the needs of deep-sea sample collection. In 1988, the technology center cooperated with the need of the deep-sea survey operation of the "Deep Sea 6500" manned submersible, and built the "Trench", a ten-thousand-meter unmanned remotely operated submersible. The submarine "Trench" is controlled and operated by the working mother ship, which can conduct deep-sea survey for a long time. Japan attaches great importance to the development of unmanned cabled submersibles. It has not only recent research projects, but also large long-term plans. At present, Japan is implementing a large-scale plan including the development of advanced unmanned remotely operated vehicles. This kind of unmanned cabled submersible system needs new development and breakthroughs in remote operation, acoustic imaging, underwater telemetering omnidirectional thruster, seawater transmission system, ceramic application technology, underwater navigation positioning and control, etc. The direct goal of this work is to effectively serve the oil and gas exploration industry with a water depth of less than 200 meters and completely replace the dangerous underwater operations currently performed by divers.
2. Europe
The "Little Jason" cabled submersible developed by British scientists has its unique technical characteristics. It uses computer control, and



