








With the increasing attention paid by countries around the world to maritime rights and interests, the anti-submarine and anti-mine equipment in the naval equipment is also gradually developing towards modernization, low cost and low casualties. Therefore, the underwater unmanned combat system has become the focus of military equipment research and development in countries around the world, and has gradually extended its development to the deep-sea field. Because the deep-sea AUV underwater robot needs to bear high water pressure when working in deep water, and the terrain and hydrological environment under deep water are very complex, many key technologies need to be broken through, and the deep-sea AUV underwater robot has become the development hotspot in this field. The deep-sea AUV underwater vehicle is a deep-sea underwater unmanned vehicle. Its main tasks include deep-sea exploration, target recognition, deep-sea countermeasures, etc.
The development and use of deep-sea AUV AUVs are significantly different from those of shallow water AUVs. In terms of structure, not only the pressure of the pressure tank but also the risk of water leakage due to the reduction of tightness caused by the deformation of the tank body after the pressure is considered; In terms of overall balance, with the increase of diving depth, the sea water density changes greatly, which affects the buoyancy of AUV underwater vehicle and makes it unbalanced. This requires full consideration of buoyancy adjustment in the design process; In terms of navigation and positioning, the AUV underwater vehicle that has been submerged in the deep sea cannot calibrate the inertial navigation using traditional methods, and needs to adopt new methods to achieve this function. It can be seen that the deep-sea AUV underwater robot has many characteristics compared with the shallow-water AUV underwater robot.
1、 Development status and characteristics of deep-sea AUV
1. Development status at home and abroad
With the development of ocean engineering technology, many key technologies of deep-sea AUV continue to break through. Many countries are studying their own deep-sea AUV underwater robots for military or civilian use. It is preliminarily estimated that there are more than ten different types of deep-sea AUV underwater robots in the world. For example, ECA in France, Hydroid in the United States, Tuna Robotics in Norway and HUGIN series in Norway have all deeply studied and successfully developed deep-sea AUV underwater robots. Many domestic research institutions are also deeply studying deep-sea AUV underwater robots. Therefore, at present, various countries, including China, attach great importance to deep-sea AUV underwater robots, and the application fields of deep-sea AUV underwater robots are also increasingly broad.
2 Development status of deep-sea AUV at home and abroad
⑴ REMUS6000
The REMUS6000 autonomous unmanned underwater vehicle (AUV) is the AUV with the deepest working depth in the series of products of Hydroid. Its shape and related components are shown in the figure below.

▲ REMUS6000 outline drawing
Since the REMUS6000 autonomous underwater unmanned underwater vehicle can track and navigate the seabed independently, it can carry a payload and operate at a maximum depth of 6000 m to measure the characteristics of the sea water, including conductivity, temperature, chemical composition, and map the seabed through bathymetry, sonar side scan, magnetism, gravity and photography. The basic forms of the REMUS6000 autonomous underwater unmanned underwater vehicle include the vehicle, bathymeter, side scan and sediment penetration sonar, navigation and communication devices and other related equipment.
The REMUS6000 autonomous underwater unmanned underwater vehicle can also be configured with special sensors according to user requirements to meet special requirements. The main parameters of REMUS6000 are as follows: the diameter of the vehicle is 71cm, the length of the vehicle is 3.96m, the weight of the vehicle in the air is 862kg, the maximum working depth is 6000m, the endurance is 22h (typical speed), and the maximum speed is 4.5kn.
⑵ Bluefin-21
Tuna Robotics is a well-known design and manufacturer of autonomous autonomous underwater vehicles in the United States. The unmanned underwater vehicles launched by the company include small Bluefin-9, medium Bluefin-12 and large Bluefin-21. Bluefin-21 is a highly modular autonomous unmanned underwater vehicle, which can carry a variety of sensors and payloads. Its power capacity is large, and it can work for a long time even at the maximum water depth, and can be operated and used by various emergency ships. Free replacement module - The design of the unmanned underwater vehicle includes the payload segment and battery module that can be replaced at the mission site. Various subsystems can be contacted to speed up the turnaround time and allow on-site maintenance, thus accelerating the operation speed. Its shape is shown in the figure below.

▲ Bluefin-21 cloth into water
The main uses of Bluefin-21 are offshore survey, search and rescue, anti-mine, unexploded weapons disposal, oceanographic investigation, archaeology and exploration. The main technical parameters of this type of AUV are: the diameter of the vehicle is 533mm, the length is 4390mm, the mass in the air is 750kg, and the maximum working depth is 4500m; Endurance: 25h when the standard payload is 3kn; Speed 4.5kn; Sensors: side-scan sonar, shallow seabed profiler and multi-beam echo sounder.

(3) HUGIN series AUV underwater robot
Since the launch of the HUGIN series autonomous underwater vehicles in Norway in the 21st century, the AUVs such as HUGIN1000, 3000, 4500 and HUGIN ⁃ MR have gradually developed from the prototype AUV. The shape of HUGIN 4500 AUV is shown in the figure below.
The HUGIN 4500 AUV is the largest in the HUGIN series. The structural form of the aircraft is the same as that of other aircraft in the series, except that it is larger and heavier. The main difference is that it uses a semi-fuel cell with higher power, with a capacity of 30% more than the HUGIN 3000 AUV. The size and battery capacity of the vehicle allow it to carry more powerful sensors, such as high-resolution shallow seabed profiler and side-scan sonar. At present, HUGIN 4500 AUV is only used as "Surveyor III" of American C&C Technology Company, with the maximum working water depth of 4500 m. The main parameters of HUGIN 4500 AUV are: the diameter of the aircraft is 1000mm; Length 6400mm; 1500 kg in air; The maximum working depth is 4500m; The sensor side scan sonar is a shallow seabed profiler with a working frequency of 230kHz or 410kHz, an operating range of 225m, a resolution of 7m and a working frequency of 1-6kHz. Camera system, multi-beam bathymetric system, CTD, depth sensor, Doppler log, ultra-short baseline underwater acoustic positioning system and underwater acoustic data modem can also be installed on the aircraft.
At present, the Norwegian Navy has two sets of 4500 AUV systems for the rapid assessment of anti-mine and ring, equipped with HISAS 1030 high-resolution synthetic aperture sonar, operating at a speed of 3.5 knn in the water depth of 400 m, capable of detecting 2700 km2 per hour, with a endurance of 17 h, using side-scan sonar with a endurance of 24 h, and the maintenance time between two missions is 1 h.
(4) Explorer-level AUV underwater robot
The AUV of ISE Company in Canada is about 4.5m long and 0.69m in diameter, with different loads. Its weight in the air is between 580 and 800kg, and its maximum submergence depth is 3000m. Its cruise speed is between 1 and 5 kn, and it can carry various loads in the load section of the AUV. 1.1 m long retractable communication antenna, which is helpful for mission re-planning and can increase the communication distance between the mother ship and the vehicle. The shell consists of one 7075-T6 aluminum cylindrical section and two 7075-T6 aluminum end covers. The diameter and length that can be used inside are 61cm and 159.5cm. The end cover is connected with the cylinder by aluminum clamping device. The free water inlet section is made of fiberglass. Vehicle endurance: 120km @ 3kn. Configured sensors: Doppler log, depth sensor, altimeter, GPS antenna fixed on the mast and ultra-short baseline transponder as positioning device, navigation device, radio communication and iridium communication system. In addition, emergency equipment includes transponder, locator, flashlight and radio frequency radio beacon.

▲ Explorer AUV recovery
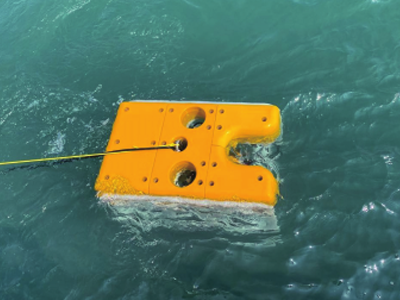
⑸ CR-2 deep-sea AUV underwater robot
This type of deep-sea AUV is developed by Shenyang Institute of Automation and can be used for deep-sea underwater resource survey, marine environment survey, etc. Its main parameters include: maximum operating depth of 6000m, maximum underwater speed of 2kn, endurance of 10h, diameter of 800mm, length of 4.5m, weight of 1500kg. According to the mission requirements, the submersible is equipped with underwater camera, side-scan sonar, shallow profiler and other detection equipment.

▲ Outline drawing of CR-2 type
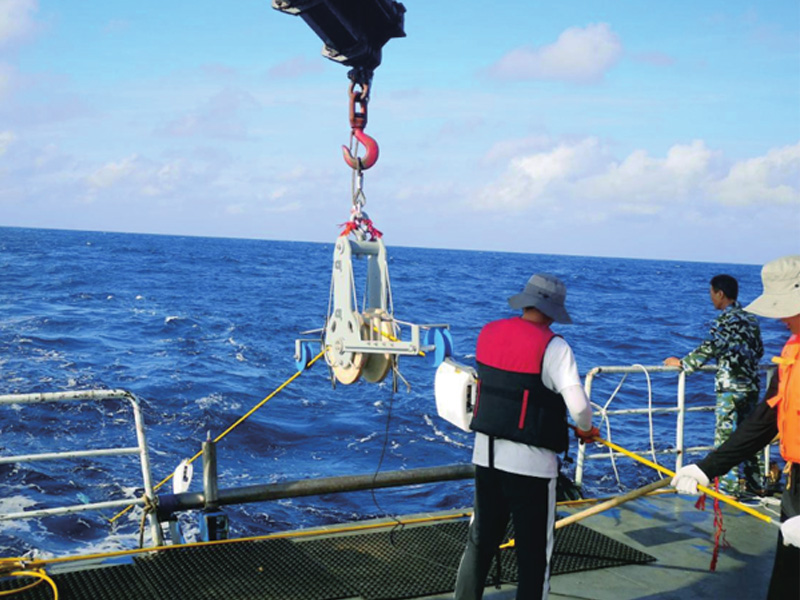
(6) Poseidon 6000 deep-sea AUV underwater robot
This type of AUV is applied to deep and deep sea search and rescue type AUV, and is the first AUV underwater vehicle used for deep sea search and rescue in China. The main parameters are: maximum working depth of 6000m, diameter of 880mm, length of 7.5m, maximum speed of 5kn, maximum endurance of 24h. According to the needs of the mission, it carries many detection equipment, such as USBL, aircraft black box search sonar array, deep sea bathymetric side-scan sonar, underwater camera, CTD, deep sea acoustic communicator, and forward looking sonar.

▲ Poseidon 6000 recycling
2、 Key technologies of deep-sea AUV
The development of deep-sea AUV needs to break through many technologies, and the most critical technologies include power energy technology, navigation and positioning technology, underwater communication technology, and autonomous mission control technology.
1 Power energy technology
Because the deep-sea AUV underwater robot needs to work in the special environment of deep-sea underwater, it has high requirements for power energy, which requires high energy density, good safety, easy maintenance, low cost, and even requires the battery to withstand deep-sea water pressure. Therefore, the battery is usually selected as the carrier of power energy. Generally, the batteries used in deep-sea AUVs mainly include lead-acid batteries, silver-zinc batteries and lithium-ion batteries. At present, the majority of lithium-ion batteries used in deep-sea AUVs.
The specific energy and energy density of the secondary battery in the lithium-ion battery are 4 times and more than 2 times of that of the lead-acid battery and the nickel-cadmium battery respectively, and the service life is 130 times of that of the silver-zinc battery, which has become the mainstream of foreign applications at present. The secondary lithium-ion battery is used in the REMUS series AUV.
2 Navigation and positioning technology
Because the deep-sea AUV underwater robot generally uses the combination of inertial navigation and log for navigation during underwater navigation, and the deep-sea AUV cannot surface to calibrate the inertial navigation in real time, so navigation and positioning will be one of the key technologies of deep-sea AUV. At present, some foreign research and development institutions use other equipment to assist in positioning, for example, the HUGIN series in Norway uses the combination of inertial navigation device, Doppler log, and underwater ultra-short baseline positioning device to assist in positioning integrated navigation, and its navigation accuracy is satisfactory.
With the continuous in-depth research of navigation and positioning technology, the inertial navigation device of the future deep-sea AUV underwater robot will continuously improve the pure inertial navigation accuracy, which will improve the navigation and positioning accuracy of the deep-sea AUV by an order of magnitude, and is expected to meet the navigation accuracy requirements without relying on Doppler log and satellite positioning device.
3 Underwater communication technology
In the underwater operation process of deep-sea AUV underwater robot, the only way to communicate with the working mother ship is underwater acoustic communication; However, the transmission rate of underwater acoustic communication is low, the communication reliability is greatly affected by the marine environment, and the signal attenuation is serious. Therefore, all countries have invested a lot of manpower and material resources to study the technology in this field. At present, the typical development directions in this field include underwater acoustic channel coding technology, underwater acoustic spread spectrum technology, and gradually improve the quality of underwater acoustic communication.
In addition, the communication networking technology of underwater unmanned aerial vehicles is also the focus of research in various countries, but only a few countries have successfully applied it to products.
4 Autonomous mission control technology
The autonomous task control technology is not only the key technology of the deep-sea AUV underwater robot, but also the core technology of the deep-sea AUV underwater robot. This technology includes the management of the task, intelligent planning, autonomous status inspection and autonomous fault handling, autonomous obstacle avoidance and autonomous navigation. Autonomous task control technology will move towards intelligent task analysis in the future, and plan the route independently according to the task, and optimize the time and path of the operation independently according to the current navigation status and equipment status.
3、 Development trend of deep-sea AUV
From the above development of deep-sea AUV underwater robots at home and abroad, it can be seen that the development of deep-sea AUV underwater robots is moving towards miniaturization, intelligence, rapid delivery and rapid response, and its development is roughly divided into three stages:
In the first stage, the AUV underwater robot that can navigate in the deep sea will be developed to solve the key technologies required for the deep sea underwater navigation, such as the design and processing technology of the deep pressure cabin, the pressure sealing technology, and the underwater navigation control technology.
In the second stage, the load equipment technology will be developed on the basis of the first stage, and the key technologies such as detection, target identification, deployment, recovery and docking will be deeply studied, and finally a high-maturity product will be formed for practical applications.
The third stage is to optimize the deep-sea AUV underwater robot. The development of small volume, small weight, convenient use, high degree of intelligence, reliable use, and underwater operation electrode pair insertion electrolyte simulation is difficult to achieve the best. The use of multiple small electrode pairs in parallel, and the use of multi-objective planning method to optimize the size of electrode and simulation device, can effectively simulate the large multi-strand electrode of electrode minesweeping equipment-sea water load.
The simulated load will generate a large amount of heat during the power-on process, and the heat dissipation problem needs to be considered. Due to the space limitation, this problem has not been discussed in this paper, and needs further research.
Source: Digital Ocean and Underwater Attack and Defense
Turn from: Ocean Life in Stream



