





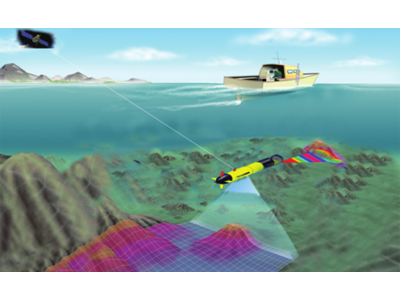



In recent years, autonomous underwater vehicle (AUV) has been widely used in the hydrological survey market to collect marine environmental data. These AUVs can sail for a long time and can work in areas where conventional survey vessels cannot work. Although the AUV cost is economical and reasonable relative to its workload over time, there are limitations in data processing. How can we effectively collect data from AUV to get the final product?

Download data from AUV
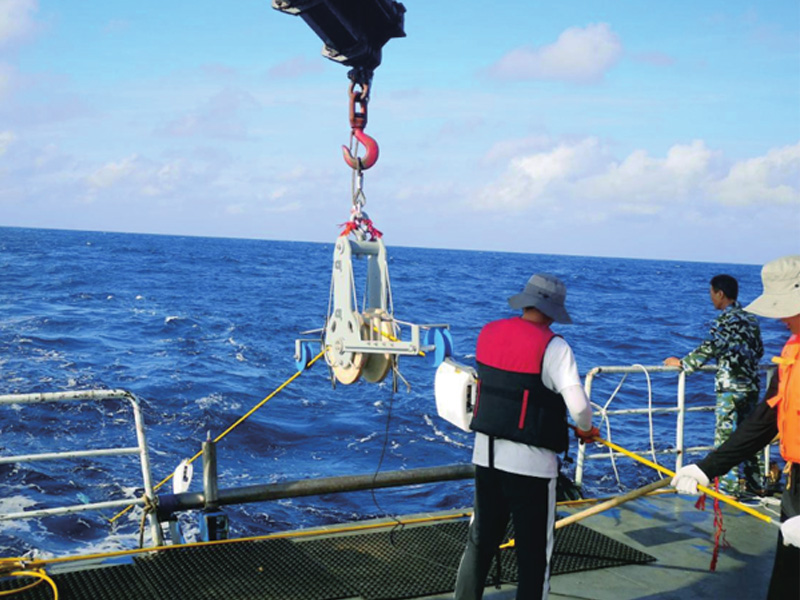
Massive bathymetric and side scan data were collected for each task. For 4-hour section measurement, 70GB data will be collected, and it will take more than 1 hour to download via USB connection. Removable hard disk may not be practical, because the AUV needs to maintain water tightness, so it can only take time to download data. For some large AUVs, the entire segment containing battery and data storage has been removed.
Prepare format conversion
Once the data is downloaded, the sensor data must be in the format available for processing. Make it into a common format in the industry, such as HSX, GSF or XTF, allowing more software to process data.
In this paper, all data are converted into HYPACK HSX format and processed with HYPACK software: MBMAX64 for water depth processing and HYSCAN for side scan processing.
The coherent sounding system carried by some AUVs requires additional steps, and must be processed into a certain data format before being converted to the HYPACK HSX format. Other sonar data can be directly converted into HSX format.
For the sake of measurement efficiency, these data conversion can be carried out on the AUV carrier. After data acquisition of each line, the original file can be converted into processing format, but the data is still on the AUV carrier. We still need to consider the time required to download the data from the AUV, but then we can start processing immediately.
error
Each sensor on the AUV contributes to a certain degree of sounding or positioning error. The three errors we have seen are navigation drift and data adjustment, sonar update rate corresponding to turning speed, AUV water depth calculation (pressure sensor) and potential errors.
Navigation adjustment
Some AUVs have good sensor navigation; For other AUVs, the positioning drift is obvious. The data processing software has tools to assist in processing data:
Processed navigation file and sonar data fusion
After carrier drift reduction, the navigation file is an estimate of the true position of the AUV. Extract the original navigation file from the carrier, and then correct it with the known seabed markers to generate an improved navigation file. During conversion, this file replaces the navigation data recorded during the task.
Adjust the position with the known offset value – determine the offset value at the end of the line – in proportion to the distance traveled along the line
Before AUV diving, obtain GPS positioning. At the end of the line, the AUV gets a new position. The difference between GPS positioning and AUV positioning is used to adjust the survey line. Although not accurate, this method assumes that the drift and speed of the whole survey line are constant and adjusted proportionally according to the distance traveled on the survey line. Taking the water depth as the profile line, we can see that at the end of the survey line, this drift causes obvious water depth difference.
Line turning coverage
The second error can be observed when the AUV turns. Ideally, all survey lines are designed as single section. For each section of results, data interruption occurs. Once the turn is completed, start a new line. However, in the following example, the AUV turns 30 ° in 8 seconds. In most cases, this is not a problem.
During the mission, the update rate of multi-beam sonar is 2 Hz. It can be determined that with this ping rate, AUV can completely cover the seabed at a depth of 110m at a speed of 2 knots. However, the edge of the strip (175m from the bottom) cannot completely cover the seabed, because the travel distance of the edge beam exceeds the size of the beam footprint at a turning speed of 4 ° per second.
This leaves a gap. The system Ping rate needs to be greater than 12Hz to fill these areas. (Turn rate filter can completely clear this data)
This can be done in shallow water. However, in this case, two straight lines are used to replace the polyline. The straight lines intersect when turning to completely cover the area. Of course, the disadvantage is that it increases the measurement time.
Calculate water depth from pressure sensor
The AUV depth comes from the pressure sensor. The UNESCO standard formula can be used to calculate the towed fish depth (stored in the HSX file, identifier DFT) and add it to the sonar value to get the actual water depth. In Figure 3, pay attention to the water entry at the beginning of the survey line. When no fish depth is applied, the measured data will maintain a constant height.
However, the calculation of water depth is inaccurate. The uncertainty of the sensor is based on variable factors - sea state, wave height and atmospheric pressure - it is impossible to measure these values and correct them in real time. The role of the wave is to make up water above the AUV, which changes the pressure reading of the carrier sensor. The error caused by pressure change is small. We can measure the air pressure at the beginning and end of the task and interpolate according to time, but the rate of change of air pressure is not constant.
Uncorrected
The pressure-depth curve contains these small errors. The sample data shows the peak and valley measurements of 60 cm pressure readings in a single diving mission.
If we measure the depth of the seabed and do not apply any draft correction, we can observe that the depth of water has a 20 cm amplitude change. Taking this as the reference water depth, we can try to adjust the water depth of the pressure sensor without modifying the seabed topography, and make water depth correction for the AUV.
By directly applying the water depth of the pressure sensor, we can observe a 55cm high frequency jitter from the peak to the trough.
The water depth of the pressure sensor is averaged for 5 seconds, and the high and low frequency jitters are removed. The peak-valley water depth is less than 23 cm, which is consistent with the baseline seabed water depth.
conclusion
AUV has increased its presence in the survey and marine work market. But like all sensors, it also has errors. The AUV water depth and positioning error are attributed to the load, carrier size and environmental conditions. This article lists several problems you may encounter. Some problems are easy to solve. It is beneficial to design the linear measurement task only, but the errors caused by navigation drift and fluctuation can only be corrected by estimation, so the corrected data may not be very accurate.



