








In recent years, autonomous underwater vehicle (AUV) has been a research hotspot in the field of underwater vehicle (UUV), and has been widely used in marine scientific research, marine resource survey, marine security and other fields. With the support of the state and relevant departments, China's deep-sea AUV has made major breakthroughs in technology and carried out large-scale aviation applications, It has played an irreplaceable role in the investigation of various deep-sea resources This paper briefly introduces the research status and application results of deep-sea AUV abroad, and looks forward to the future development trend of deep-sea AUV in China. In recent years, countries around the world have paid more and more attention to the development of underwater vehicle (UUV), which has been widely used in marine scientific research, marine engineering operations and national defense and military fields. Generally, underwater vehicles can be divided into autonomous underwater vehicle (AUV) Cable remote operated vehicle (ROV) and autonomous&remote operated vehicle (ARV)

AUV can sail independently with its own energy and can perform a wide range of detection tasks, but its operation time, real-time data and operation ability are limited; ROV relies on umbilical cable to provide power, and underwater operation takes a long time, with strong real-time data and operation capability, but the operation scope is limited [1]; ARV is a hybrid underwater vehicle that combines AUV and ROV [2]. Combining the advantages of AUV and ROV, ARV is a new type of underwater vehicle in the process of the development from information AUV to operational AUV. It can transmit data in real time through optical fiber micro-cable. It can not only achieve large-scale detection, but also achieve precise observation of underwater fixed points. It can also carry light work tools to complete light work Since the University of Washington developed the world's first SUPV (self profiled underwater research vehicles) in the 1950s, the development of AUV has gone through more than 60 years At the end of the 1990s, with the development of computer technology and the increasingly mature electronic technology, AUVs entered a rapid development stage. A number of influential AUVs have successfully developed and applied ABE [3, 4] in the United States, Autosub-1 [5] in the United Kingdom, the Explorer of Theseus China in Canada, and CR-01 jointly developed by China and Russia In the 21st century, the AUV technology has been further developed and the commercial AUV has been constantly emerging. For example, the Bluefin series AUV of Hydroid Company of the United States, the REMUS series AUV of Kongsberg Company, the HUGIN series AUV [10], and the Gavia series AUV of Teledyne Company of the United States, [11] mark that the AUV has entered the stage of large-scale practical application The working depth of the deep-sea AUV is not strictly defined. The deep-sea AUV involved in this paper refers to the AUV with a depth of 4500 m and above
1、 Foreign AUV research achievements
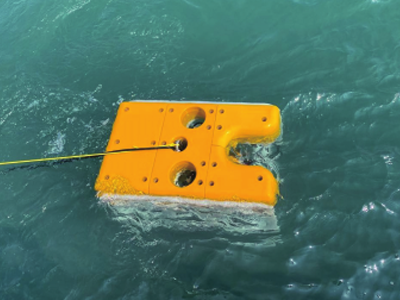
Deep-sea AUV technology has always been AUV in recent years. With the continuous progress of deep-sea technology in the world, the number of AUVs is also increasing The deep-sea AUV usually has good fluid shape, such as torpedo shape, vertical flat shape, etc., to reduce its navigation resistance and improve its durability; Considering different detection requirements, the carrier is arranged in the form of single, double and triple body; It can be equipped with acoustic, optical and marine environmental measurement loads, and can perform various detection tasks. A number of deep-sea AUVs with foreign influence have played an important role in recent offshore operations, mainly including the REMUS 6000 [9] produced by Kongsberg Company, and the Autosub developed by the Bluefin Southampton National Marine Center (NOC) developed by the American Hydroid Company Among them, REMUS 6000 and Bluefin-21 are mature commercial AUVs in the world. The former successfully searched the wreckage of Air France 447 engine in 2010 [9] (Picture 1 (a)), and the latter participated in the search of Air Malaysia MH370 in 2014 (Figure 1 (b)) Autosub 6000 has also carried out many scientific investigations in the Indian Ocean hydrothermal region (Figure 1) (c)) The SeaBed AUV [13] (Figure 1 (d)) and ABE [14, 15] (e)) developed by the Woods Hole Institute of the United States both adopt the split structure layout. The seabed topography mapping has been carried out in the mid-ocean ridge hydrothermal region for many times, and a large number of photos have been taken Sentry AUV has a vertical flat shape and is equipped with a rotary propeller, which can modularize and change various detection loads to perform different detection tasks [16~19]
2、 Research status of deep-sea AUV in China
Since the early 1990s, China has been focusing on the development of AUV to meet the needs of deep-sea resource exploration and seabed target search In the mid-1990s, the Shenyang Institute of Automation of the Chinese Academy of Sciences and relevant domestic units successfully developed China's first 1000 meter explorer AUV On this basis, the United Nations took the lead in cooperation with Russia, China's first 6000m CR-01 and CR-2 deep-sea AUV have been successfully developed "CR-01 was successfully applied in the Pacific polymetallic tuberculosis survey, reaching the international advanced level. During the 12th Five Year Plan period, with the strong support of the National Oceanic Administration and the Chinese Academy of Sciences, Shenyang Institute of Automation established two technical systems of Qianlong series deep-sea AUV AUV. The Qianlong series AUV is mainly used for deep-sea resource exploration, mainly including: 6000 meter Qianlong I, 4500 meter Qianlong II, Qianlong III; and exploration series AUV It is mainly used for marine scientific research, mainly including: exploration 100, exploration 1000, exploration 4500, exploration 4500, and 4500 meters deep sea AUV, mainly used for scientific investigation in cold spring area Also during the 12th Five-Year Plan period, Harbin Engineering University completed the research and development of the 1000-meter intelligent water-IV and the 2000-meter underwater survey AUV in Tianjin University [20]. Unlike the shallow-water AUV power diving method, in order to save energy, China's deep-water AUV went down to the seabed without power.



