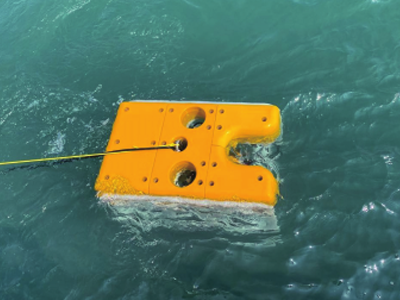
PX-180ARV is a new autonomous underwater robot with AUV/ROV mode, which is equipped with 5 thrusters and can realize 5 degrees of freedom movement underwater. It is equipped with high-definition camera and illumination, which can be controlled by fiber optic in real time and online video observation, and can realize autonomous navigation in AUV mode and motion functions such as navigation, depth and hovering in ROV mode. Compact structure, can be single/double operation deployment and recovery, suitable for a variety of marine survey tasks.
PX-180ARV is a new autonomous underwater robot with AUV/ROV mode, which is equipped with 5 thrusters and can realize 5 degrees of freedom movement underwater. It is equipped with high-definition camera and illumination, which can be controlled by fiber optic in real time and online video observation, and can realize autonomous navigation in AUV mode and motion functions such as navigation, depth and hovering in ROV mode. Compact structure, can be single/double operation deployment and recovery, suitable for a variety of marine survey tasks.

It has two modes of AUV/ROV, which can change freely according to the use scenario. Autonomous underwater navigation can be realized in AUV mode, and ROV mode has the motion functions of steady-state navigation, steady-state depth, and hover, which is applicable to a wide range of application scenarios.

Equipped with high-definition camera and high lumen lamp, it can be controlled in real time through optical fiber and observed in real time through online video.

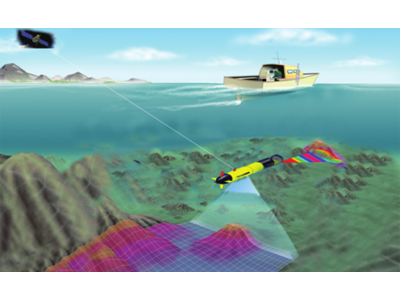
ARV not only uses AUV mode to accurately control navigation, but also uses motion functions such as fixed navigation, fixed depth and hover under ROV mode. It has powerful power of 5 thrusters and carries different task sensors according to needs to complete tasks in applicable scenarios.

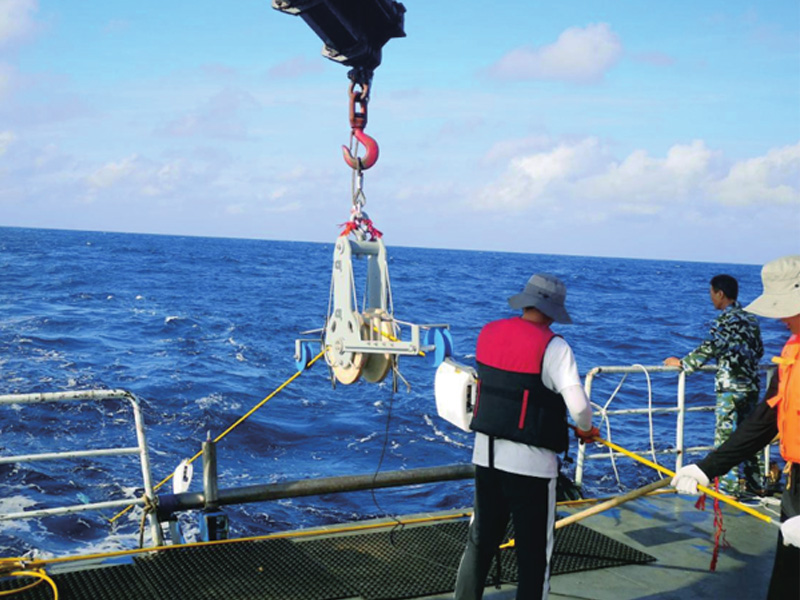
Small structure, light weight, can be single/double operation layout recovery.

| Specifications | PX-180ARV |
|---|---|
| Physical Size | 1200mm*380mm*400mm |
| Weight | 30kg |
| Working depth | 0-200m |
| Velocity range | 0-4kn |
| Endurance | Equipped with 1KWh lithium battery; Maximum endurance of 4 hours; Charging time 5 hours,5 propeller design,5 degrees of freedom movement mode, with hover, automatic depth determination and navigation and other functions |
| System configuration | Photo resolution: 8million pixels, video resolution: 1080p/60fps, viewing angle: PTZ control, viewing angle greater than 150 °, lighting: 2x2200 lumen LED |
| Extendable sensor | Magnetometer, depth sensor, combined antenna :GPS, radio, WIFI, magnitude, scalable: Doppler velocimeter (DVL) forward-looking sonar, externally mounted 4K camera, underwater acoustic communication, side scan sonar, manipulator |
| Cable and transportation | AUV mode: equipped with DVL and acoustic communication, it can complete underwater autonomous navigation, autonomous decision making and path planning. ROV mode: Optional power carrier control cable (up to 200 m), optical fiber zero buoyance control cable (up to 1000 m), optional special reel winch, shore-based control box |
| The above is the standard configuration of the product parameters, each product can be customized according to customer requirements | |
Scientific research
Submarine reconnaissance
Military reconnaissance
Marine resource exploration
Military reconnaissance
Experimental teaching demonstration

Copyright © 2026 Qingdao Pengpai Ocean Exploration Technology Co,Ltd Designed by Huishang Media